
What is control theory?
Your car’s cruise control is an illustrative example where control theory is used in an engineering application. A cruise control system modulates the engine throttle to maintain a desired speed. Cruise control is a feedback-control system because it relies on continual measurements—feedback—to determine how to modulate the throttle. Specifically, cruise control relies on measurements of the car’s speed. A modern adaptive cruise control relies not only on feedback of your car’s speed but also on feedback of the distance from your car to the nearest car in front of it. Designing a cruise control system requires some understanding of the interactions between the car’s speed, the engine throttle, the hills and valleys of the road, and the cruise control system itself. Thus, control theory can be broadly thought of as a study of interactions.
Control theory provides mathematically rigorous techniques for designing and analyzing feedback systems. These techniques are critical to a wide array of technologies such as aircraft, automobiles, robotics, power plants, and chemical processing. New vehicles and devices that are impacted by thermodynamics, fluid dynamics, and/or structural dynamics can be greatly enhanced by innovative control methods. Thus, many areas of engineering benefit from advances in control-system theory and technology.
My research focuses on the development and application of control theory to diverse areas in science and engineering—ranging from formation control methods for autonomous vehicles to the study of human learning. For example, my research group develops new cooperative control methods for swarms—large groups—of autonomous unmanned air vehicles, better known as drones. These methods allow swarms to collaborate autonomously while avoiding collisions. As another example, we use techniques from control theory to study how humans interact with engineered systems such as aircraft, automobiles, and robots. This work has potential application in a variety of areas, including robotic-assisted surgery, human-controlled robotic swarms, active prostheses, robotic-therapy devices, and autonomous vehicles.
Small-satellite technology is another important application that relies heavily on control theory. Small satellites are less expensive to build and launch than large spacecraft. In addition, multiple small satellites working cooperatively can often exceed the operational capability of a single monolithic satellite. However, the control systems used for large spacecraft are not ideally suited to small satellites. Thus, Professor T. M. Seigler in the Department of Mechanical and Aerospace Engineering and I are developing innovative small-satellite control technologies that are efficient, reliable, and can be powered by renewable energy sources.
One of these new technologies is a system for controlling a small satellite’s attitude, that is, rotational orientation. This unconventional attitude control method relies on a system of vibrating masses as opposed to the rotating wheels used for traditional attitude control on large spacecraft. By appropriately vibrating the masses, we can steer the satellite to any desired attitude, for example, pointing toward Earth or another planet. This new approach is energy-efficient, lightweight, and not subject to significant friction wear. We are currently collaborating with Space Tango, Inc. to fabricate a small-satellite prototype with this new attitude control system. This prototype will be sent to the International Space Station for on-orbit testing in 2022.
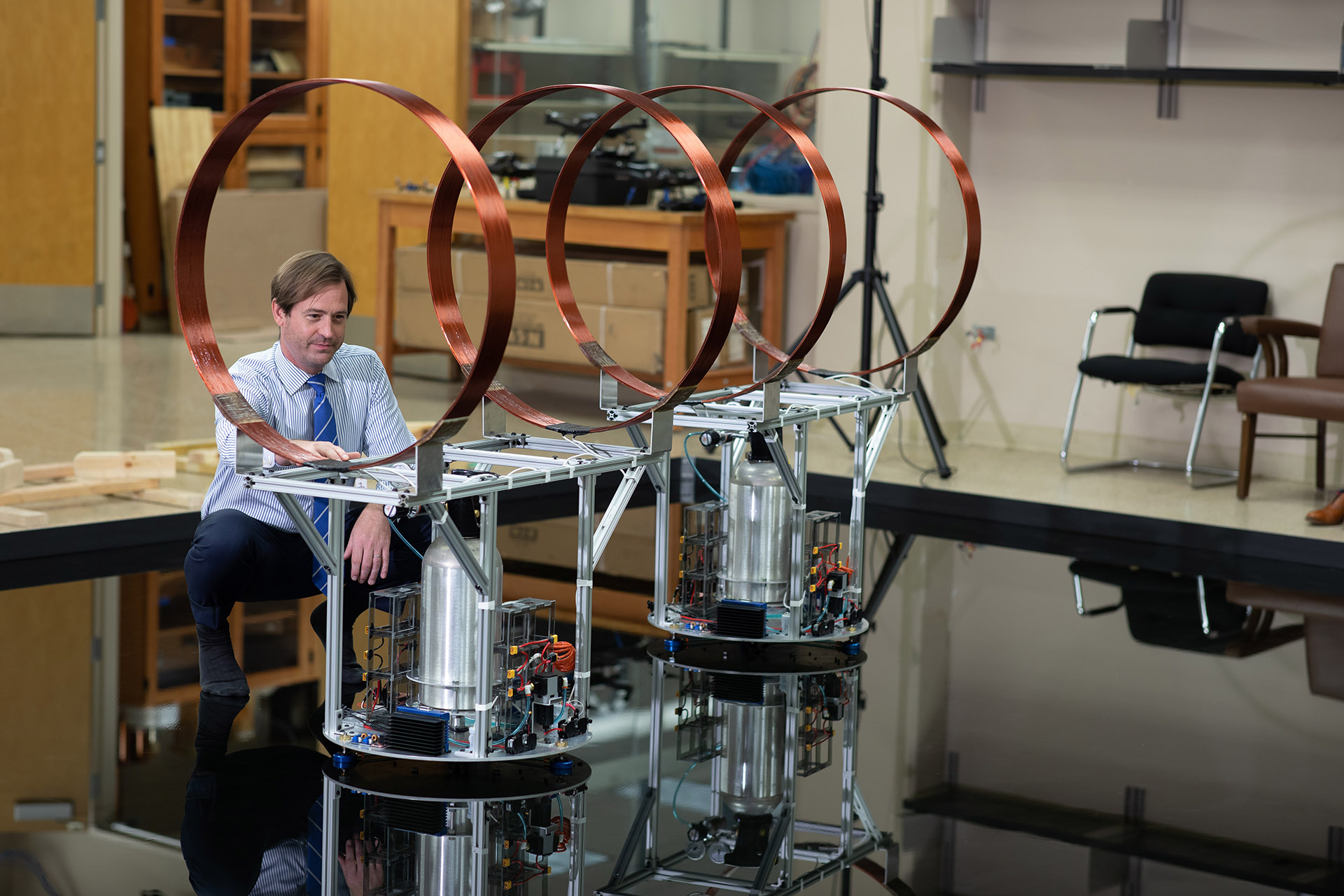
We are also developing a new electromagnetic formation flying method, where each small satellite in a swarm is equipped with electromagnetic coils, which can be energized to create forces between satellites. By appropriately energizing the coils, we can generate forces that drive the satellites into desired swarm formations. One key aspect of this work is the use of alternating magnetic field forces to decouple inter-satellite forces, and thus, enable swarms with many satellites.
The work on small satellite swarms is supported in part by the National Aeronautics and Space Administration under 80NSSC17M0040 through NASA Kentucky. Prof. Hoagg’s other research activities are supported by NSF, NASA, USDA/NIFA, AFOSR, and industry partners.
 James Keppeler, Daniel Benitez, Marcus Rodriguez, Leah Blair, Bruno Athie Teruel and Hugo Reyes-Centeno, assistant professor of anthropology, examine artifacts from his human fossil record research. Photo Courtesy: UK Research.")

